October 27, 2015
How sensorimotor intelligence may develop
Robotic systems controlled by a neural network spontaneously develop self-organized behaviors • Researchers propose a novel learning rule in PNAS to explain the development of sensorimotor intelligence
It is fascinating to observe a robot exploring its physical possibilities and surroundings, and subsequently developing different self-taught behaviors without any instructions. In their paper (DOI: 10.1073/pnas.1508400112) published on October, 26, 2015 in PNAS (Proceedings of the National Academy of Sciences), Professor Ralf Der from the Max Planck Institute for Mathematics in the Sciences, und Georg Martius, Postdoc and Fellow at the Institute for Science and Technology (IST Austria), demonstrate the emergence of sensorimotor intelligence in robots based on their proposed learning rule.
How brains or artificial neural networks develop autonomous, self-directed behavior is a fundamental challenge for both neuroscience and robotics. Traditionally, the self-organized development of behavior is explained by using concepts such as intrinsic motivation or curiosity. In their paper, Der and Martius argue however that the emergence of such behavior can be grounded directly in the synaptic plasticity of the nervous system.
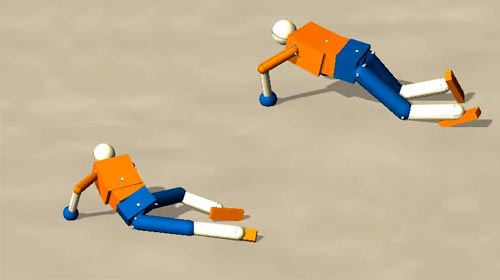
To test their hypothesis, the authors use bioinspired robots consisting of a humanoid and a hexapod robot in physically realistic computer simulations. The robots receive sensory input from their bodies but are not given any form of instruction or task. What can then be observed is a rich spectrum of rhythmic behaviors of the robots as they explore various movements. Solely because of the tight coupling of environment, body, and brain (in this case an artificial neural network), the robots can obtain feedback from their situation and adapt quickly. This, together with a simple, learned self-model, allows them to develop a form of sensorimotor intelligence. Different scenarios show how they acquire the ability to crawl, walk on changing surfaces, or even cooperate with another robot. The authors explain this phenomenon with the proposed synaptic plasticity, a coupling mechanism that allows a simple neural network to generate constructive movements for almost any given body.
Potentially, this concept can also lead to a new understanding of the early stages of sensorimotor development in the natural world and even be used to elucidate some saltations in evolution. Georg Martius: “It is commonly assumed that leaps in evolution require mutations in both the morphology and the nervous system, but the probability for both rare events to happen simultaneously is vanishingly low. But if evolution was indeed in line with our rule, it would only require bodily mutations—a much more productive strategy. Imagine an animal just evolving from water to land: Learning how to live on land during its own life time would be very beneficial for its survival.”
Georg Martius is a postdoc and ISTFELLOW at IST Austria. The ISTFELLOW program has been set up for exceptional researchers, which is partially funded by the European Union. Martius works in the groups of Christoph Lampert (Computer Vision and Machine Learning) and Gašper Tkačik (Biophysics and Neuroscience) after being a postdoc at the Max Planck Institute for Mathematics in the Sciences in Leipzig.
