27. Oktober 2015
Die Entwicklung der sensomotorischen Intelligenz
Von neuralen Netzen kontrollierte Roboter entwickeln spontan Verhaltensweisen in Eigenregie • Forscher postulieren ein neue Lernregel in PNAS, um die Entwicklung von sensomotorischer Intelligenz zu erklären
Es ist faszinierend, einen Roboter dabei zu beobachten, wie er seine eigenen physikalischen Möglichkeiten und die Umgebung erkundet, um dann ohne externe Anweisungen verschiedene Verhaltensweisen zu erlernen. Professor Ralf Der vom Max-Planck-Institut für Mathematik in den Naturwissenschaften, und Georg Martius, Postdoc und Fellow am Institute for Science and Technology (IST Austria) demonstrieren in ihrer Publikation (DOI: 10.1073/pnas.1508400112) vom 26. Oktober 2015 in PNAS (Proceedings of the National Academy of Sciences) die Entstehung sensomotorischer Intelligenz bei Robotern, basierend auf der von ihnen vorgestellten neuen Lernregel.
Wie es dazu kommt, dass ein Gehirn oder ein künstliches neuronales Netz ein autonomes, selbstgesteuertes Verhalten entwickelt, stellt sowohl für die Neurowissenschaft als auch für die Robotik eine grundlegende Herausforderung dar. Traditionell wird die Entwicklung von selbstorganisiertem Verhalten mit Konzepten wie etwa intrinsischer Motivation oder Neugierde erklärt. In ihrer Publikation argumentieren Der und Martius hingegen, dass das Aufkommen solchen Verhaltens direkt in der synaptischen Plastizität des Nervensystems begründet sein kann.
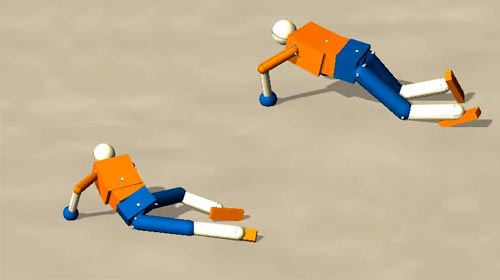
Zur Überprüfung ihrer Hypothese verwenden die Autoren bio-inspirierte Roboter in physikalisch realistischen Computersimulationen. Die Roboter, in Form einer menschenähnlichen Gestalt und eines Sechsfüßers, erhalten sensorischen Signale von ihren Körpern, bekommen jedoch keinerlei Anweisungen oder Aufgaben. Man kann dann ein umfangreiches Spektrum von rhythmischen Bewegungen der Roboter beobachten, während sie ihre Umgebung erkunden. Aufgrund der engen Rückkoppelung zwischen Umwelt, Körper und Gehirn (oder in diesem Fall einem künstlichen neuronalen Netz) können die Roboter Rückmeldung zu ihrer Situation erhalten und sich rasch anpassen. Dieser Mechanismus zusammen mit einem einfachen selbstgelernten Modell ermöglicht es ihnen, eine Form von sensomotorischer Intelligenz zu entwickeln. In verschiedenen Szenarien wird gezeigt, wie die Roboter Fähigkeiten erwerben wie zum Beispiel Kriechen, Fortbewegung auf sich veränderndem Untergrund, oder sogar die Kooperation mit einem zweiten Roboter. Die Autoren erklären dieses Phänomen mit der von ihnen vorgeschlagenen synaptischen Plastizität. Dabei handelt es sich um einen Rückkoppelungsmechanismus, der es einem einfachen neuronalen Netz erlaubt, konstruktive Bewegungsabläufe für fast jeden beliebigen Körper zu generieren.
Dieses Konzept könnte auch zu einem neuen Verständnis der frühen sensomotorischen Entwicklung in der Natur führen, und möglicherweise sogar Evolutionssprünge erklären helfen. Dazu Georg Martius: „Es wird allgemein angenommen, dass für evolutionäre Sprünge sowohl Mutationen in der Morphologie als auch im Nervensystem auftreten müssen. Jedoch ist die Wahrscheinlichkeit, dass beide seltene Ereignisse gleichzeitig auftreten, verschwindend gering. Wenn wir aber annehmen, dass unsere Regel auch in der Natur zum Einsatz kommt, wären ausschließlich körperliche Veränderungen nötig, was eine viel zielführendere Strategie bedeuten würde. Denken wir etwa an ein Tier, das sich gerade vom Wasser- zum Landlebewesen entwickelt: wenn es diesen Schritt innerhalb der eigenen Lebensspanne lernen kann, wäre das für sein eigenes Überleben ausgesprochen günstig.“
Georg Martius ist Postdoc und ISTFELLOW am IST Austria. Das ISTFELLOW Programm wurde für herausragende WissenschaftlerInnen am Institut mit Ko-Finanzierung der Europäischen Union eingerichtet. Martius arbeitet in der Forschungsgruppe von Christoph Lampert (Computer Vision und Maschinelles Lernen) und in der Forschungsgruppe von Gašper Tkačik (Theoretische Biophysik und Neurowissenschaft). Davor war er Postdoc am Max Planck Institute for Mathematics in the Sciences in Leipzig.
